

i-ACTIVSENSE
Driver Attention Alert (DAA) (Some Models)
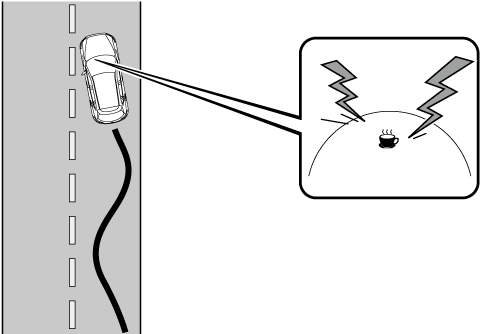
The DAA is a system which detects driver fatigue and decreased attentiveness, and encourages the driver to take a rest.
When the vehicle is driven inside traffic lane lines at about 65 to 140 km/h (40 to 87 mph), the DAA estimates the amount of accumulated fatigue and decreased attentiveness of the driver based on the information from the Forward Sensing Camera (FSC) and other vehicle information, and encourages the driver to take a rest using an indication on the multi-information display and a warning sound.
Use the DAA on expressways or highways.
Refer to Forward Sensing Camera (FSC) (Search).
Do not rely completely on DAA and always drive carefully:
The DAA detects driver fatigue and decreased attentiveness and encourages the driver to take a rest, however, it is not designed to prevent the vehicle from straying. If you rely too much on the DAA it could lead to an accident. Drive carefully and operate the steering wheel appropriately.
In addition, the system may not be able to detect driver fatigue and decreased attentiveness correctly depending on the traffic and driving conditions. The driver must take sufficient rest in consideration of safer driving.


-
The DAA operates when all of the following conditions are met.
-
The vehicle speed is about 65 to 140 km/h (40 to 87 mph).
-
The system detects white (yellow) lane lines.
-
The system has completed learning of the driver’s driving data.
-
-
The DAA does not operate under the following conditions.
-
The vehicle speed is less than about 65 km/h (40 mph).
-
The vehicle speed exceeds about 140 km/h (87 mph)
-
The vehicle is making a sharp turn.
-
The vehicle is changing lanes.
-
The system cannot detect white (yellow) lane lines.
-
-
The DAA may not operate normally under the following conditions.
-
White (yellow) lane lines are less visible because of dirt or fading/patchiness.
-
The vehicle is jolted or swayed continuously by strong winds or rough roads.
-
The vehicle is driven aggressively.
-
When making frequent lane changes.
-
-
The DAA detects driver fatigue and decreased attentiveness based on the driving data when the vehicle is driven at about 65 to 140 km/h (40 to 87 mph) for about 20 minutes. The driving data will be reset under the following conditions.
-
The vehicle is stopped for 15 minutes or longer.
-
The vehicle is driven at less than about 65 km/h (40 mph) for about 30 minutes.
-
The ignition is switched off.
-
-
After the DAA has displayed the first message encouraging rest, it does not display the next one until 45 minutes have passed.
Close Proximity Warning
If your vehicle rapidly closes in on the vehicle ahead because the vehicle ahead applies the brakes suddenly while you are traveling in headway control, the warning sound activates and the brake warning is indicated in the display. Always verify the safety of the surrounding area and depress the brake pedal while keeping a safer distance from the vehicle ahead. Additionally, keep a safe distance from the vehicles behind you.

In the following cases, the warnings and brakes may not operate even if your vehicle starts closing in on the vehicle ahead.
-
You are driving your vehicle at the same speed as the vehicle ahead.
-
Directly after the TJA has been set.
-
Directly after the accelerator pedal is released.
-
Another vehicle cuts into the driving lane.
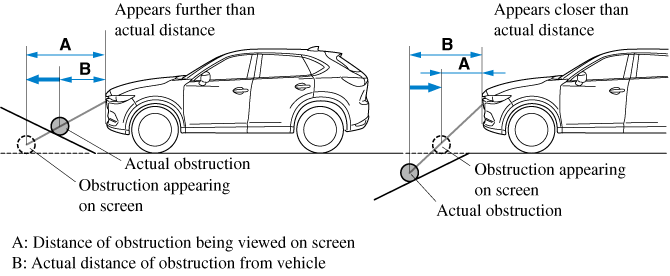
Margin of Error Between Road Surface on Screen and Actual Road Surface
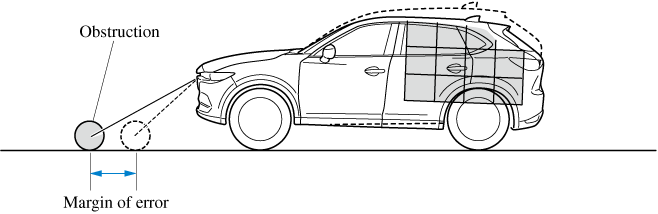
There might be some margin of error between the road surface appearing on the screen and the actual road surface. A margin of error in the perceived distance could lead to an accident, therefore be aware of the following conditions which can more easily produce errors in the perceived distance.
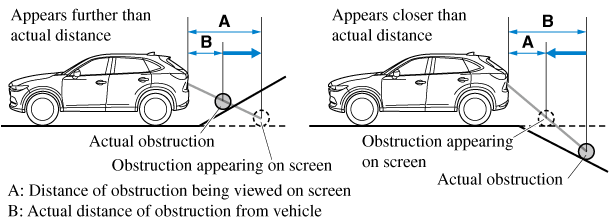
The vehicle tilts due to weight of passengers and cargo.
If the vehicle is tilted, obstructions picked up by a camera can appear farther or closer than the actual distance from the vehicle.
Front camera
Side camera
Rear camera
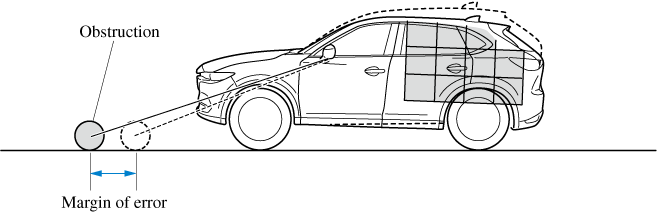
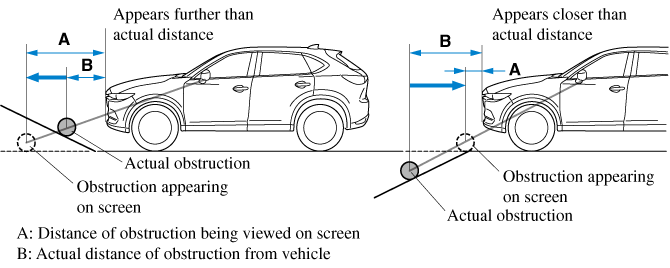
There is a steep up or down grade in the road at the front or rear of the vehicle
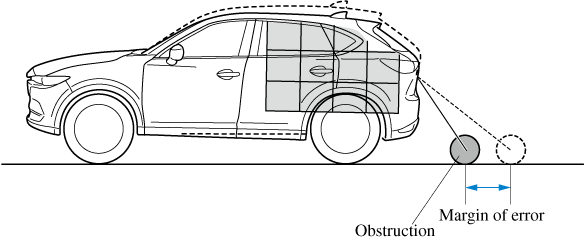
If there is a steep up or down grade in the road at the front or rear of the vehicle, obstructions picked up by the camera can appear farther or closer than the actual distance from the vehicle.
Front camera
Side camera
Rear camera
If the vehicle is on a slope, obstructions taken by the camera can appear farther or closer than the actual distance from the vehicle.
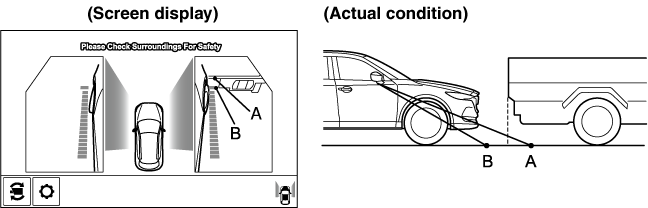
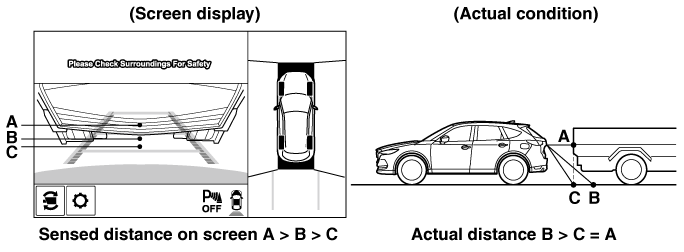
Three-dimensional object at vehicle front or rear
Because the vehicle front end guide lines (side camera) or the distance guide lines (rear camera) are displayed based on a flat surface, the distance to the three-dimensional object displayed on the screen is different from the actual distance.
Side camera
Rear camera
Top View/Rear View
Use the top view/rear view to assist in checking the safety of the surrounding area when accelerating from a stop, parking, or stopping the vehicle.
Range of displayed screen image
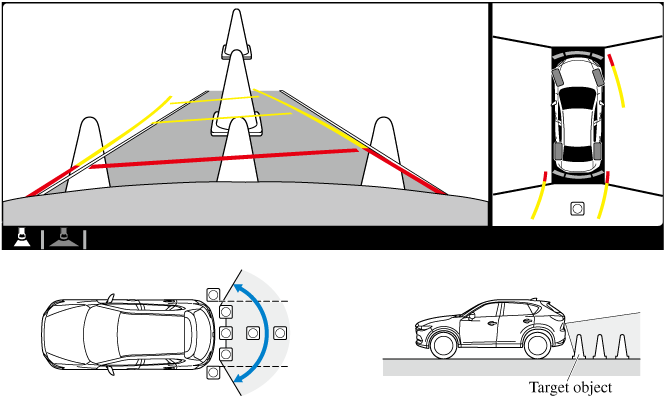
-
In the top view screen, the areas in black at the front and rear of the vehicle image and the seams where each of the camera images merge are blind spots.
-
Because images displayed in the top view screen are processed from each camera, the top view screen may display in the following ways.
-
If an image containing an object with a conspicuous color is picked up by any of the cameras, the screen area for each camera may be affected and it may display in that color.
-
Obstructions displayed in the rear view may not display on the top view screen.
-
If the position or angle of each camera changes due to tilting of the vehicle, the image may appear distorted.
-
Lines on the road may appear distorted at the seams where each of the camera images merge.
-
The screen area for each camera may appear bright/dark depending on the illumination level around any of the cameras.
-
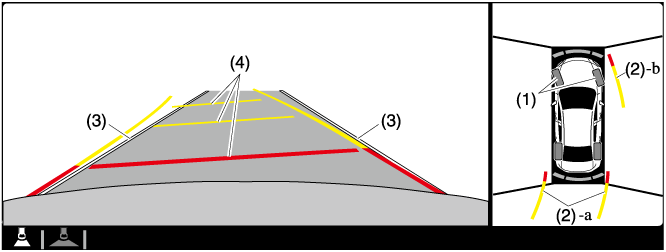
Viewing the screen
|
Display/Icon |
Content |
|
|---|---|---|
|
(1) |
Tire icon |
Indicates the tire direction. Moves in conjunction with the steering wheel operation. |
|
(2) |
Projected vehicle path lines (yellow & red) |
Indicates the approximate projected path of the vehicle. Moves in conjunction with the steering wheel operation. a) Indicates the path where the edge of the rear bumper is expected to travel. b) Indicates the path where the outer side of the vehicle is expected to travel. |
|
(3) |
Extended vehicle width lines (blue) |
These guide lines indicate the approximate width of the vehicle. |
|
(4) |
Projected vehicle path distance guide lines (yellow & red) |
These guide lines indicate the approximate distance to a point measured from the rear of the vehicle (from the end of the bumper).
|
The setting can be changed so that the projected vehicle path lines are not displayed.
Refer to the Settings section in the Mazda Connect Owner's Manual.
How to use the projected vehicle path line function
-
The front of the vehicle swings out wide when turning the steering wheel while reversing. Maintain sufficient distance between the vehicle and an obstruction.
-
The parking sensor detection range has limitations. For example, obstructions closing in from the side and objects short in height may not be detected. Always confirm the safety around the vehicle visually when driving.
For details, refer to the parking sensor obstruction detection indication and warning sound.
Refer to Parking Sensor System (Search).
-
Because there might be a difference between the image displayed on the screen, such as indicated in the following, and the actual conditions when parking, always check the safety at the rear of the vehicle and the surrounding area directly with your eyes.
-
Even though the back end of the parking space (or garage) displayed on the screen and distance guide lines appear parallel, they may not actually be parallel.
-
When parking in a space with a division line on only one side of the parking space, even though the division line and the vehicle width guide line appear parallel, they may not actually be parallel.
-
-
The following shows an example of vehicle parking with the steering wheel turned to the left while backing up the vehicle. When backing into a parking space from the opposite direction, the steering operation is reversed.
-
Back the vehicle into the parking space by turning the steering wheel so that the vehicle enters the center of the parking space.

-
After the vehicle starts entering the parking space, stop and adjust the steering wheel so that the distance between the vehicle width lines and the sides of the parking space on the left and right are roughly equal, and then continue backing up slowly.
-
Once the vehicle width lines and the sides of the parking space on the left and right are parallel, straighten the wheels and back the vehicle slowly into the parking space. Continue checking the vehicle's surroundings and then stop the vehicle in the best possible position. (If the parking space has division lines, check whether the vehicle width guide lines are parallel to them.)

Top View/Rear Wide View


Radar Sensor (Front) (Some Models)
Your vehicle is equipped with a radar sensor (front).
The following systems also use the radar sensor (front).
-
Distance Recognition Support System (DRSS)
-
Mazda Radar Cruise Control with Stop & Go function (MRCC with Stop & Go function)
-
Smart Brake Support (SBS)
-
Traffic Jam Assist (TJA)
The radar sensor (front) functions by detecting the radio waves reflected off a vehicle ahead or an obstruction sent from the radar sensor.
The radar sensor (front) is mounted behind the front emblem.
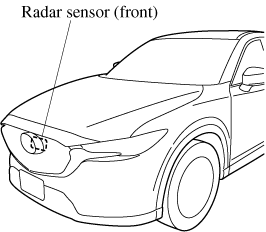
If “Front Radar Sensor Blocked” is displayed in the multi-information display of the instrument cluster, clean the area around the radar sensor (front).
Heed the following precautions to assure correct operation of each system.
-
Do not adhere stickers (including transparent stickers) to the surface of the radiator grille and front emblem in and around the radar sensor (front), and do not replace the radiator grille and front emblem with any product that is not a genuine product designed for use with the radar sensor (front).
-
The radar sensor (front) includes a function for detecting soiling of the radar sensor's front surface and informing the driver, however, depending on the conditions, it may require time to detect or it may not detect plastic shopping bags, ice or snow. If this occurs, the system may not operate correctly, therefore always keep the radar sensor (front) clean.
-
Do not install a grille guard.
-
If the front part of the vehicle has been damaged in a vehicle accident, the position of the radar sensor (front) may have moved. Stop the system immediately and always have the vehicle inspected at an Authorized Mazda Dealer.
-
Do not use the front bumper to push other vehicles or obstructions such as when pulling out of a parking space. Otherwise, the radar sensor (front) could be hit and its position deviated.
-
Do not remove, disassemble, or modify the radar sensor (front).
-
For repairs, replacement or paint work around the radar sensor (front), consult an Authorized Mazda Dealer.
-
Do not modify the suspension. If the suspension are modified, the vehicle's posture could change and the radar sensor (front) may not be able to correctly detect a vehicle ahead or an obstruction.
-
Under the following conditions, the radar sensor (front) may not be able to detect vehicles ahead or obstructions correctly and each system may not operate normally.
-
The rear surface of a vehicle ahead does not reflect radio waves effectively, such as an unloaded trailer or an automobile with a loading platform covered by a soft top, vehicles with a hard plastic tailgate, and round-shaped vehicles.
-
Vehicles ahead with low vehicle height and thus less area for reflecting radio waves.
-
Visibility is reduced due to a vehicle ahead casting off water, snow, or sand from its tires and onto your windshield.
-
The luggage compartment is loaded with heavy objects or the rear passenger seats are occupied.
-
Ice, snow, or soiling is on the front surface of the front emblem.
-
During inclement weather such as rain, snow, or sand storms.
-
When driving near facilities or objects emitting strong radio waves.
-
-
Under the following conditions, the radar sensor (front) may not be able to detect vehicles ahead or obstructions.
-
The beginning and end of a curve.
-
Roads with continuous curves.
-
Narrow lane roads due to road construction or lane closures.
-
The vehicle ahead enters the radar sensor's blind spot.
-
The vehicle ahead is running abnormally due to accident or vehicle damage.
-
Roads with repeated up and down slopes
-
Driving on poor roads or unpaved roads.
-
The distance between your vehicle and the vehicle ahead is extremely short.
-
A vehicle suddenly comes close such as by cutting into the lane.
-
-
To prevent incorrect operation of the system, use tires of the same specified size, manufacturer, brand, and tread pattern on all four wheels. In addition, do not use tires with significantly different wear patterns or tire pressures on the same vehicle (Including the temporary spare tire).
-
If the battery power is weak, the system may not operate correctly.
-
When driving on roads with little traffic and few vehicles ahead or obstructions for the radar sensor (front) to detect, “Front Radar Sensor Blocked” may be temporarily displayed, however, this does not indicate a problem.
-
The radar sensors are regulated by the relevant radio wave laws of the country in which the vehicle is driven. If the vehicle is driven abroad, authorization from the country in which the vehicle is driven may be required.
