i-ACTIVSENSE


Blind Spot Monitoring (BSM) Warning Indicator Light/Display Indicator/Blind Spot Monitoring (BSM) Warning Beep
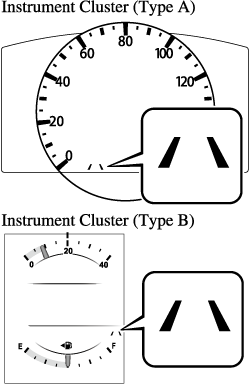
The BSM or Rear Cross Traffic Alert (RCTA) system notifies the driver of the presence of vehicles in adjacent lanes or at the rear of the vehicle using the BSM warning indicator light, the warning sound and the display indicator (vehicles with instrument cluster (Type A/B) and active driving display) (BSM) while the systems are operational.
BSM warning indicator lights
The BSM warning indicator lights are equipped on the left and right door mirrors. The warning indicator lights turn on when a vehicle approaching from the rear in an adjacent lane is detected.
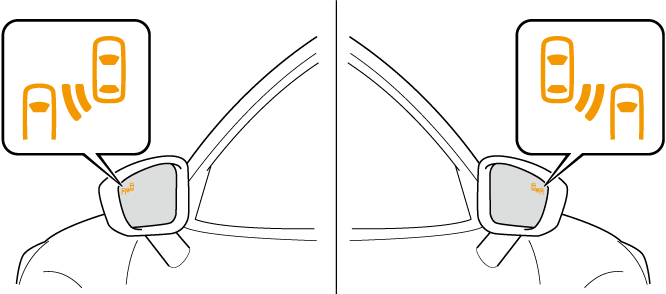
When the ignition is switched ON, the warning indicator light turns on momentarily and then turns off after a few seconds.
Forward driving (BSM operation)
The BSM detects vehicles approaching from the rear and turns on the BSM warning indicator lights equipped on the door mirrors according to the conditions. Additionally, while a BSM warning indicator light is illuminated, if the turn signal lever is operated to signal a turn in the direction in which the BSM warning indicator light is illuminated, the BSM warning indicator light flashes.
Reverse driving (Rear Cross Traffic Alert (RCTA) system operation)
The Rear Cross Traffic Alert (RCTA) system detects a vehicle approaching from the rear of the vehicle and flashes the BSM warning indicator lights.
Function for cancelling illumination dimmer
If the BSM warning indicator lights turn on when the parking lights are turned on, the brightness of the BSM warning indicator lights is dimmed.
If the BSM warning indicator lights are difficult to see due to glare from surrounding brightness when traveling on snow-covered roads or under foggy conditions, press the dimmer cancellation button to cancel the dimmer and increase the brightness of BSM warning indicator lights when they turn on.
Refer to Dashboard Illumination (Search), (Search), (Search).
Display indicator (Vehicles with multi-information display and active driving display)
The detected approaching vehicle and warning are displayed in the multi-information display and active driving display when the vehicle is moving forward (BSM operational).
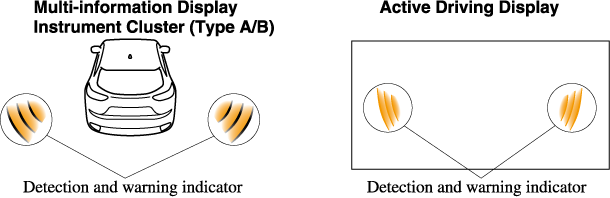
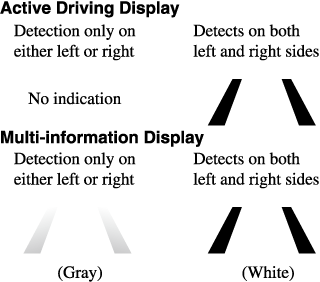
The detected direction is displayed with a detection indicator (white) when an approaching vehicle is detected. In addition, if the turn signal lever is operated to signal a lane change while the vehicle is detected, the display changes the color (amber) of the warning indicator.
BSM warning beep
The BSM warning beep is activated simultaneously with the flashing of a BSM warning indicator light.
System Operation
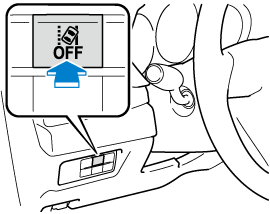
Make sure that the LAS & LDWS OFF indicator light in the instrument cluster is turned off. When the LAS & LDWS OFF indicator light is turned on, press the switch and make sure that the indicator light turns off.
When the ignition is switched ON, the system goes on standby.
Drive the vehicle in the center of the vehicle lane while the system is on standby. When all of the following conditions are met, and the system becomes operational.
-
The engine is running.
-
The vehicle speed is about 60 km/h (37 mph) or faster.
-
The system detects white (yellow) lane lines on both the right and left sides.
-
The driver is operating the steering wheel.
-
The driving lane is neither narrow nor wide.
When the system becomes operational, the LAS & LDWS indication (white) is displayed on the multi-information display or active driving display.
If the indication on the active driving display has been turned off using the personalization features, the LAS & LDWS indication (white) is displayed on the multi-information display.
When only a vehicle lane line (yellow) on either the left or right is detected, the LAS & LDWS indication on the active driving display turns off.
If the indication on the active driving display has been turned off using the personalization features, the LAS & LDWS indication on the multi-information display is displayed in gray and the system goes on standby.


The LAS & LDWS goes on stand-by status in the following cases:
-
The system cannot detect white (yellow) lane lines.
-
The vehicle speed is less than about 60 km/h (37 mph).
-
The ABS/TCS is operating.
-
The TCS is turned off.
(If the TCS is turned off while the system is operational, a warning beep is heard and the system goes on standby.)
-
The vehicle is making a sharp curve.
-
The brake pedal is depressed.
-
The steering wheel is operated abruptly.
-
The width of a lane is excessively narrow or wide.
-
The LAS & LDWS does not operate until the system detects white (yellow) lane lines on either the left or right.
-
When the system detects a white (yellow) lane line on one side only, the system will not operate the steering wheel operation assist and the warning for the lane line on the side that is not being detected. The steering wheel operation assist and the warning is only for a lane deviation on the side that is being detected.
-
If the driver takes his or her hands off the steering wheel (not holding the steering wheel), the warning sound is activated and an alert is indicated in the multi-information display or the active driving display.
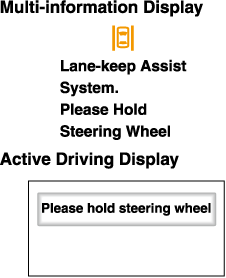
If the steering wheel is held lightly, or depending on the road conditions, the system may detect that you have released the steering wheel (not holding the steering wheel) even if you are holding it, and display a message in the multi-information display or the active driving display.
-
The timing at which the lane departure warning is activated and the steering wheel operation assist is performed varies.
-
The following settings for the LAS & LDWS can be changed. Refer to the Settings section in the Mazda Connect Owner's Manual.
-
Steering operation assist operational/non-operational
-
Cancel sensitivity (likelihood of steering assist) (Mazda Connect (Type A) only)
-
Vehicle lane line display
When the LAS & LDWS becomes operational while on standby, the vehicle lane lines are displayed in the multi-information display and the active driving display. In the vehicle lane lines display indicating the operation status, the color of the vehicle lane lines being detected changes to white.
(Stand-by status)
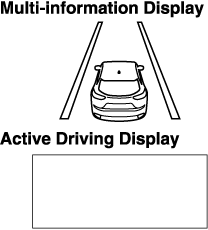
(Operational status)

Auto cancel
In the following cases, the LAS & LDWS is automatically canceled, the LAS & LDWS warning indication (amber) turns on, and an alert is displayed. When the LAS & LDWS become operational, the system turns back on automatically.
-
The temperature inside the camera is high or low.
-
The windshield around the camera is foggy.
-
The windshield around the camera is blocked by an obstruction, causing poor forward visibility.
Auto cancel of warning/steering assist
When the following operations are performed, the LAS & LDWS operation is canceled automatically. The LAS & LDWS resumes automatically after the operation.
-
The steering wheel is operated abruptly.
-
The brake pedal is operated.
-
The accelerator pedal is operated.
(To cancel the automatic sensitivity cancel function, deselect “Cancel sensitivity” in the personalization features setting.) (Mazda Connect (Type A) only)
-
The turn signal lever is operated.
-
The vehicle crosses a lane line.
-
After the operation, the LAS & LDWS operation may not operate for a period of 5 seconds at the most until the lane lines are detected.
-
Under the following conditions, the LAS & LDWS cancels the warning/steering assist automatically.
-
The driver takes his/her hands off the steering wheel.
(The LAS & LDWS is designed to assist the driver's steering operation and it will resume operation automatically when the driver holds the steering wheel.)
-
The TCS OFF switch is pressed to cancel the TCS.
-
Steering operation assist OFF (non-operational)
The steering operation assist for the LAS & LDWS can be changed to non-operational (OFF).
Refer to the Settings section in the Mazda Connect Owner's Manual.
When the steering operation assist has been changed to inoperable (OFF), only the lane departure warning is operational.
System operation
Make sure that the LAS & LDWS OFF indicator light in the instrument cluster is turned off. When the LAS & LDWS OFF indicator light turns on, press the switch and make sure that the indicator light turns off.
Drive the vehicle in the center of the driving lane while the LAS & LDWS OFF indicator light in the instrument cluster is turned off.
The system becomes operational when all of the following conditions are met.
-
The system detects white (yellow) lane lines on both the right and left sides or on either side.
-
The vehicle speed is about 60 km/h (37 mph) or faster.
-
The vehicle is driven on a straight road or road with gentle curves.
-
The engine is running.
The LAS & LDWS goes on stand-by status in the following cases:
-
The system cannot detect white (yellow) lane lines.
-
The vehicle speed is less than about 60 km/h (37 mph).
-
The vehicle is making a sharp curve.
-
The vehicle is making a curve at an inappropriate speed.
-
The LAS & LDWS remains on stand-by until it detects white (yellow) lines on both the left and right sides, or on either side.
-
When the system detects a white (yellow) lane line on one side only, the system will not activate warnings for the lane line on the side that is not being detected.
-
The distance and warning sensitivity (likelihood of a warning) which the system uses to determine the possibility of a lane departure can be changed. (Mazda Connect (Type A) only)
Refer to the Settings section in the Mazda Connect Owner's Manual.
Vehicle lane line display
When the LAS & LDWS becomes operational while on standby, the vehicle lane lines are displayed in the multi-information display. The system changes to operational status display when the system detects a white (yellow) line on either the left or right.
(Stand-by status)
(Operational status)
Auto cancel
In the following cases, the LAS & LDWS is automatically canceled, the LAS & LDWS warning indication (amber) turns on, and an alert is displayed. When the LAS & LDWS become operational, the system turns back on automatically.
-
The temperature inside the camera is high or low.
-
The windshield around the camera is foggy.
-
The windshield around the camera is blocked by an obstruction, causing poor forward visibility.
(Auto cancel of warnings)
When the following operations are performed, the LAS & LDWS determines that the driver intends to make a lane change and the system operation is canceled automatically. The LAS & LDWS resumes automatically after the operation.
-
The steering wheel is operated abruptly.
-
The brake pedal is depressed.
-
The accelerator pedal is depressed.
(To cancel the automatic sensitivity cancel function, deselect “Warning sensitivity” in the personalization features setting.) (Mazda Connect (Type A) only)
-
The turn signal lever is operated.
-
The vehicle crosses a lane line.
Stopping the Advanced Smart City Brake Support (Advanced SCBS) System Operation
The Advanced SCBS system can be temporarily deactivated.
Refer to the Settings section in the Mazda Connect Owner's Manual.
When the Advanced SCBS system is turned off, the Smart City Brake Support (SCBS) OFF indicator light turns on.

When the engine is restarted, the system becomes operational.
When the Advanced SCBS system is set to inoperable, the Smart City Brake Support [Reverse] (SCBS R) system and the Smart Brake Support (SBS) are also set to inoperable.
Collision Warning (Some Models)
Automatic Brake Operation Display
“SCBS Automatic Brake” is indicated in the multi-information display after the Smart City Brake Support (SCBS) brakes is operated.

-
The collision warning beep sounds intermittently while the Smart City Brake Support (SCBS) brake is operating.
-
If the vehicle is stopped by the Smart City Brake Support (SCBS) operation and the brake pedal is not depressed, the warning beep sounds one time after about 2 seconds and the Smart City Brake Support (SCBS) brake is automatically released.
Collision Warning
If there is the possibility of a collision with a vehicle ahead, the beep sounds continuously and a warning is indicated in the multi-information display and the active driving display.

Front Wide View
Use the front wide view to assist in checking the safety of the surrounding area when accelerating from a stop or entering a T-shaped intersection and intersection.
Display range
Viewing the screen
|
Display/Icon |
Content |
|
|---|---|---|
 |
Extended vehicle width lines and distance guide lines (red/blue) |
Indicates the approximate width of the vehicle and the distance (from front end of bumper) in front of the vehicle.
|
-
The parking sensor obstruction detection indication does not display. Switch the screen display to the top view/front view or side view display if the parking sensor warning sound is activated.
-
The front wide view screen displays the image in front of the vehicle at a wide angle and corrects the image to help detect approaching obstructions from the side. Therefore, it differs from the actual view.
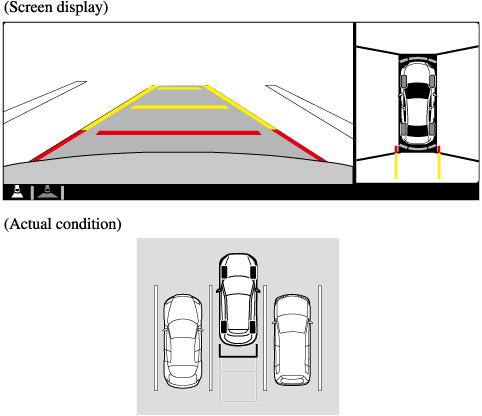
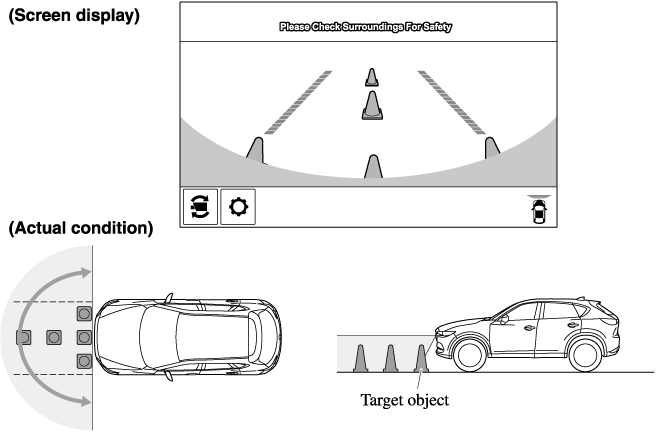
Top View/Rear View
Use the top view/rear view to assist in checking the safety of the surrounding area when accelerating from a stop, parking, or stopping the vehicle.
Range of displayed screen image

-
In the top view screen, the areas in black at the front and rear of the vehicle image and the seams where each of the camera images merge are blind spots.
-
Because images displayed in the top view screen are processed from each camera, the top view screen may display in the following ways.
-
If an image containing an object with a conspicuous color is picked up by any of the cameras, the screen area for each camera may be affected and it may display in that color.
-
Obstructions displayed in the rear view may not display on the top view screen.
-
If the position or angle of each camera changes due to tilting of the vehicle, the image may appear distorted.
-
Lines on the road may appear distorted at the seams where each of the camera images merge.
-
The screen area for each camera may appear bright/dark depending on the illumination level around any of the cameras.
-
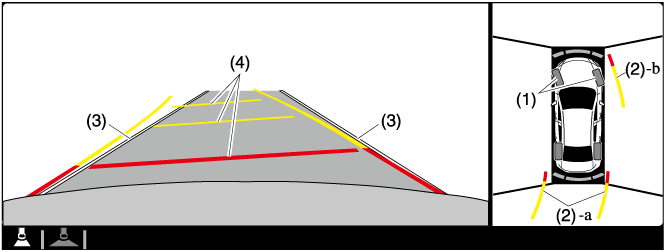
Viewing the screen
|
Display/Icon |
Content |
|
|---|---|---|
|
(1) |
Tire icon |
Indicates the tire direction. Moves in conjunction with the steering wheel operation. |
|
(2) |
Projected vehicle path lines (yellow & red) |
Indicates the approximate projected path of the vehicle. Moves in conjunction with the steering wheel operation. a) Indicates the path where the edge of the rear bumper is expected to travel. b) Indicates the path where the outer side of the vehicle is expected to travel. |
|
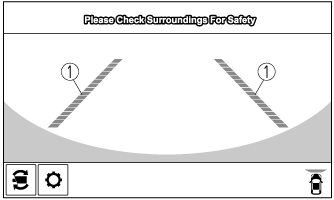
(3) |
Extended vehicle width lines (blue) |
These guide lines indicate the approximate width of the vehicle. |
|
(4) |
Projected vehicle path distance guide lines (yellow & red) |
These guide lines indicate the approximate distance to a point measured from the rear of the vehicle (from the end of the bumper).
|
The setting can be changed so that the projected vehicle path lines are not displayed.
Refer to the Settings section in the Mazda Connect Owner's Manual.
How to use the projected vehicle path line function
-
The front of the vehicle swings out wide when turning the steering wheel while reversing. Maintain sufficient distance between the vehicle and an obstruction.
-
The parking sensor detection range has limitations. For example, obstructions closing in from the side and objects short in height may not be detected. Always confirm the safety around the vehicle visually when driving.
For details, refer to the parking sensor obstruction detection indication and warning sound.
Refer to Parking Sensor System (Search).
-
Because there might be a difference between the image displayed on the screen, such as indicated in the following, and the actual conditions when parking, always check the safety at the rear of the vehicle and the surrounding area directly with your eyes.
-
Even though the back end of the parking space (or garage) displayed on the screen and distance guide lines appear parallel, they may not actually be parallel.
-
When parking in a space with a division line on only one side of the parking space, even though the division line and the vehicle width guide line appear parallel, they may not actually be parallel.
-
-
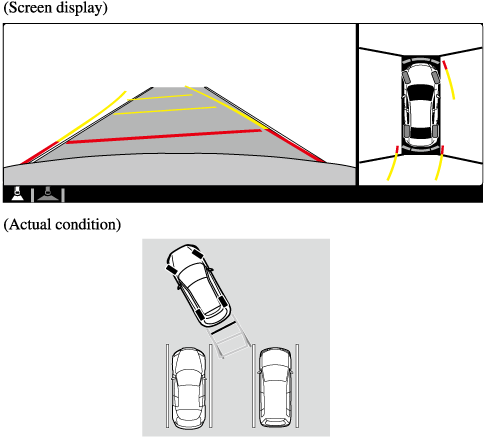
The following shows an example of vehicle parking with the steering wheel turned to the left while backing up the vehicle. When backing into a parking space from the opposite direction, the steering operation is reversed.
-
Back the vehicle into the parking space by turning the steering wheel so that the vehicle enters the center of the parking space.
-
After the vehicle starts entering the parking space, stop and adjust the steering wheel so that the distance between the vehicle width lines and the sides of the parking space on the left and right are roughly equal, and then continue backing up slowly.
-
Once the vehicle width lines and the sides of the parking space on the left and right are parallel, straighten the wheels and back the vehicle slowly into the parking space. Continue checking the vehicle's surroundings and then stop the vehicle in the best possible position. (If the parking space has division lines, check whether the vehicle width guide lines are parallel to them.)